Van superwaarnemer tot bionisch been
De robotfabriek van de RUG
Door Marit Bonne
By Marit Bonne
Marit Bonne
Welkom in de robotfabriek! Benieuwd naar de projecten? Klik dan op de afbeeldingen van de robots (en vergeet de zwerm boven de fabriek niet).

Ming Cao’s superwaarnemer
De ruimte is groot en wit. Bouwvakkers lopen regelmatig in en uit. Uit het plafond hangen snoeren en kettingen, met plastic zakken eromheen. Het ruikt er naar een mengsel van metaal en verf.
‘Hier komt een aquarium voor robotvissen’, wijst hoogleraar netwerken en robotica Ming Cao. Zijn enthousiasme over de nieuwe ruimte in Nijenborgh werkt aanstekelijk. ‘Oh, en hier kunnen we straks lopende en rijdende robots en drones testen.’
Cao loopt door naar een ander lab, waar de Clearpath staat: een lage, gele robot met grote, brede banden. Terwijl zijn promovendus Bangguo Yu de computer opstart, vertelt Cao: ‘Deze robot gebruikt zowel een camera als een 3D LiDAR, een lasersensor, om de wereld om hem heen waar te nemen, waar Tesla alleen camera’s gebruikt.’
Kleuren en reliëf
De Clearpath piept. ‘Kijk, hier staan wij’, zegt Yu. Hij gebruikt de robot voor zijn onderzoek, waarbij hij grote taalmodellen zoals ChatGPT gebruikt om hem aan te sturen. Voor navigatie bijvoorbeeld, of om bepaalde objecten te zoeken in een onbekende omgeving.
Op de computer vormt zich een duidelijk beeld van de kamer. ‘Dit is een RGB-D-camera, die de kleuren rood, groen en blauw in diepte waarneemt’, zegt Cao. ‘Zo kun je zowel een kleurenplaatje als een diepteplaatje, een reliëf, apart “zien”.’
Een robot kan van ChatGPT leren om verbanden te leggen
Clearpath kan met zijn 3D lasersensor tot wel honderd meter ver waarnemen. Zo’n LiDAR – dat staat voor Light Detection and Ranging – zendt razendsnel laserpulsen uit en vangt ze weer op om zo de omgeving in kaart te brengen. Hierdoor krijg je een wolk van puntjes die de wereld om de sensor verbeelden. Zo weet je precies waar wat staat, maar ook wat voor object het is.
De grote hoeveelheid kennis waar ChatGPT over beschikt kan Yu goed gebruiken voor zijn onderzoek. ‘Als ik jou vraag: zoek in deze kamer een wiskundeboek, dan weet je meteen dat je naar de boekenkast moet kijken’, legt Cao uit. ‘Maar een robot kan gewoon van ChatGPT leren om dat soort verbanden te leggen.’
Daarnaast is zo’n programma ook erg toegankelijk voor mensen zonder engineering-achtergrond, omdat je gebruikmaakt van de alledaagse taal. ‘Je hoeft niet goed te zijn in programmeren als je een robot wilt besturen met ChatGPT; met de chat-interface vertel je de robot gewoon wat je wilt dat hij doet’, zegt Yu.

Bahar Haghighats slimme robotzwermen
Iets groter dan een suikerklontje zijn ze, zo’n drie centimeter groot. Maar groter is immers niet altijd beter, is het motto van universitair docent Bahar Haghighat. Haar piepkleine robots werken in grote aantallen naar een gezamenlijk doel toe.
Wat dat doel is, hangt er maar net vanaf hoe je zo’n robotje bouwt en programmeert. ‘Je kunt robotzwermen ontwerpen die vliegen, zwemmen en lopen’, vertelt ze. ‘We willen dat ze zich voortbewegen en meetgegevens verzamelen.’
Bijenkolonies
Bestaande zwermen in de natuur vormen de inspiratiebron voor Haghighats werk, zoals kolonies van bijen en mieren. ‘Sociale insecten zijn er enorm goed in om in gigantische aantallen naar een gemeenschappelijk doel toe te werken’, legt ze uit. ‘Op de een of andere manier begrijpen ze hoe ze hun acties op elkaar af moeten stemmen. Maar hoe ze dat doen is grotendeels nog steeds een mysterie voor biologen.’
Sociale insecten kunnen goed samenwerken in gigantische aantallen
Haghighat probeert dit te vertalen naar haar robotjes, zodat ze zelfstandig kunnen samenwerken en precies weten wanneer ze wat moeten doen. Vooral de beweging is belangrijk, volgens haar. ‘Ingenieurs gebruiken al decennialang statische sensoren op infrastructuur’, vertelt ze. ‘Maar met sensoren die zich autonoom voortbewegen en die met elkaar samenwerken, kun je kun informatie in veel hogere resolutie krijgen over bijvoorbeeld de staat van een gebouw.’
Sommige van haar mini-robotjes hebben namelijk magnetische wielen en kunnen daarmee op verticale oppervlaktes rijden. Tegelijkertijd nemen ze de trillingen van het object waar; wijkt deze af van de norm, dan geven ze een signaal dat er iets mis is. Omdat ze mobiel zijn en met elkaar communiceren, kunnen ze ook de precieze plek van de schade nauwkeurig in kaart brengen.
Luchtkwaliteit
Maar ook op grotere schaal werken de kleine sensoren goed samen, zelfs als ze gebruikmaken van andermans beweeglijkheid. ‘We werken aan een project waarbij speciaal ontworpen sensoren op auto’s en bussen bevestigd worden, zodat ze continu de luchtkwaliteit kunnen meten’, zegt Haghighat. Terwijl de voertuigen rondrijden, breng je dus snel de luchtkwaliteit in kaart voor een hele regio of stad.
‘Nog maar twintig jaar geleden zou mijn werk sciencefiction zijn geweest’, zegt Haghighat. ‘Maar ik denk dat je over een paar decennia overal zwermen ziet, om bijvoorbeeld de omgeving te meten en het verkeer in de gaten te houden. Ze zijn echt de toekomst.’

David Lentinks bio-geïnspireerde vliegende robots
Als David Lentink een superkracht mocht kiezen, zou het vliegen zijn. ‘Vliegen is gewoon mooi’, vindt de hoogleraar biomimetica. Vogels, vliegtuigen, vliegende robots: alles wat vliegt, fascineert hem.
In zijn onderzoek probeert Lentink robots te bouwen die nog niet bestaan, met een andere structuur en ander principe. Hierin combineert hij ‘the best of both worlds’, zegt hij: wetenschap en techniek. Biologische kennis past hij toe op zijn robots. ‘Maar soms kan ik met mijn robots ook bijdragen aan fundamentele biologische vraagstukken.’
Vogels
Een mooi voorbeeld is de van vorm veranderende vleugel. ‘Het antwoord op de vraag of iets een vogel of een vliegtuig is, is heel makkelijk’, zegt hij: ‘Een vliegtuigvleugel verandert niet van vorm tijdens het vliegen; een vogel wel.’
Maar het is bijzonder lastig om een vliegtuig te maken met een van vorm veranderende vleugel. Ingenieurs plaatsen dan overal motortjes, zodat alles kan bewegen. Maar er zijn ook sensoren en een computer nodig die de beweging aansturen en meten over de hele vleugel. ‘Als je dat moet doen voor alle motortjes in zo’n vleugel, dan hebben ingenieurs al bedacht dat dit veel te zwaar wordt en vaak fout kan gaan.’
Als je vastzit, kan de natuur je helpen om vooruit te gaan
En dus combineerde hij zijn ingenieursvaardigheden met zijn biologie-achtergrond. ‘Dan kijk je natuurlijk eerst: hoe doet zo’n vogel dat?’ Toen hij ten rade ging bij biologen, lieten ze hem een filmpje zien hoe de vleugel van vogel kan in- en uitvouwen als je deze met de hand beweegt.
‘Maar het exacte mechanisme, dat konden ze me niet vertellen’, zegt Lentink. Dus ging hij zelf op onderzoek uit, samen met zijn studenten. ‘Het antwoord was zó verrassend.’
Elastiekjes
Hij kwam erachter dat de grootste veren vast zitten aan een elastisch ligament, aangestuurd door een langzame spier. ‘Als een vogel zijn vleugels uitstrekt, zorgt dit ligament ervoor dat de veren zich gelijk over de vleugel verdelen, ongeacht de vorm’, vertelt hij.
‘Toen dacht ik: nu kan een ingenieur het ook.’ Dus bouwde hij een robot volgens hetzelfde principe, waarin hij niet elke veer apart hoefde aan te sturen. Lentink verbond de veren naast elkaar met zorgvuldig afgesteld elastiekjes, om het ligament na te bootsen. ‘En dat lukte.’
Hij stuitte echter op een nieuw probleem: soms rekten de elastiekjes te ver uit, waardoor gaten tussen de veren konden ontstaan. ‘Dit gebeurde niet bij vogelveren, maar we wisten niet waarom.’
Klittenband
Wat bleek? Tussen de grote veren zit een soort microscopisch eenrichtingsklittenband dat vasthaakt op het moment dat er een gat tussen de veren dreigt te ontstaan. ‘Daarom komen er dus geen gaten in een vogelvleugel tijdens het vliegen’, legt Lentink uit. ‘Dat was voor ons een extra reden om echte vogelveren in onze allernieuwste robotvleugels te bouwen.’
Lentink hoopt dat zijn onderzoek er uiteindelijk aan bijdraagt om duurzamer en efficiënter te kunnen vliegen met van vorm veranderende vleugels. En dat het fundamentele biologische kennis oplevert, zoals over het verenklittenband. ‘Ik geloof in techniek, maar als je vastzit, kan de natuur je helpen om technisch enorm vooruit te gaan.’

De sociale robots van Paul Vogt
In het roboticalab op de derde verdieping van de Bernoulliborg knippert een wit, knuffelbaar robotje met zijn ogen. Na een luide gaap kijkt hij om zich heen, ietwat verbaasd. Zijn kleine buikje en vrolijke lach maakt dat hij iets aandoenlijks heeft, bijna menselijks.
‘Dit is onze QTrobot’, vertelt universitair docent sociale robotica Paul Vogt. Lopen kan de robot niet, maar de armen bewegen wel. En dat vrolijke gezichtje? Dat staat soms ook op onweer, of barst in tranen uit. Ook kun je gesprekken met QT voeren, om bijvoorbeeld te oefenen met je Nederlands. Net hoe je het programmeert.
Werkdruk verlichten
‘Zorgverleners kunnen robots als QT goed gebruiken’, weet Vogt. Om de werkdruk te verlichten in de ouderenzorg bijvoorbeeld, waar de robot een herinnering geeft wanneer het tijd is voor de lunch. Ook kunnen ouderen een gesprekje aanknopen met de robot.
Ouderen voelen zich hierdoor minder eenzaam
‘Ze krijgen hiermee een stukje autonomie terug en voelen zich minder eenzaam’, zegt Vogt. En het helpt om het geheugen te blijven trainen. ‘Toen een collega van de Hanzehogeschool een pilot met de robot deed in een zorginstelling, vertelde iemand haar: “Die robot gaat mij straks vertellen dat ik mijn benen omhoog moet doen.”’ Ouderen weten dus door de aanwezigheid van de robot beter wanneer het bijvoorbeeld tijd is om te bewegen.
Maar er is nog een lange weg te gaan. Elke dag een geheugensteuntje bieden is eenvoudig te programmeren, zegt Vogt. Maar weten of die boodschap ook is binnengekomen, daar ligt de uitdaging.
Machine learning
‘Menselijke communicatie is zowel verbaal als non-verbaal’, vertelt hij. Het verbale deel, de taal, kunnen we goed programmeren aan de hand van taalmodellen, legt hij uit. Maar de signalen die we geven als we iets niet hebben begrepen, zoals een vragende blik, zijn lastiger te ‘leren’ aan de robot.
‘Je kunt een deel van de sociale regels programmeren, maar machine learning speelt hierin ook een belangrijke rol’, zegt Vogt. Met andere woorden: de robot moet aan de hand van interacties beter worden in het leren van de sociale normen en waarden en hierop anticiperen. ‘Maar daar zijn we nog niet.’
Met zijn passie voor gedrag en sociale interacties probeert hij met behulp van zijn robots de non-verbale communicatie steeds verder te ontrafelen. ‘Door het menselijk gedrag na te bootsen, leer hoe je dat fundamenteel werkt.’

De robot-reddingshond van Kailai Li
Een matgrijze massa ligt op de grond. Terwijl hij langzaam op zijn vier poten komt te staan, draait de bolvormige laserscanner onder zijn kin razendsnel rondjes. Gedetecteerd: een kamer van zo’n vier bij vier meter, twee stoelen en twee kasten, een bureau en twee mensen.
Het lab van Kailai Li, kersvers universitair hoofddocent computerwetenschappen, is niet groot, maar biedt net voldoende ruimte om zijn robothond Tudor te demonstreren. ‘Geef poot’, instrueert Li de hond. Liggen, rollen, springen, een handstand en zelfs yogaposes: Tudor kan het allemaal.
Met zijn nieuwe onderzoeksgroep ASIG – Agile Sensing and Intelligence Group – ontwikkelt Li multisensorische modules en algoritmes die de robothond kan gebruiken om zich autonoom voort te bewegen in een onbekende omgeving. ‘Bijvoorbeeld na een aardbeving’, legt Li uit. ‘Dan wil je tegen zo’n robot kunnen zeggen: verken zo snel mogelijk dit gebied.’
Om naar een volgend punt te gaan, moet je eerst weten waar je bent
Geen makkelijke opdracht, met het oog op het ongelijke terrein, het puin, gebouwen die later instorten. ‘Om naar een volgend punt te gaan, moet je eerst weten waar je bent’, vertelt Li. Hiervoor zijn verschillende goede sensoren nodig, die de omgeving in realtime waarnemen.
Zelfbewust
Niet alleen de omgeving, maar ook zijn eigen positie is belangrijk om moeiteloos te bewegen in een vreemde omgeving. ‘De robot moet niet alleen weten wat er om hem heen gebeurt, maar ook bewust zijn van zichzelf: hoe snel, in welke hoek en op welke hoogte beweegt hij?’, vertelt Li.
De informatie van die sensoren kan de robot dan gebruiken om zijn bewegingen hierop aan te passen. Een stapje hoger met linksvoor, of een diepe kuil ontwijken op 12 uur. Maar ook bewegende objecten, zoals mensen, moet de robot uiteindelijk herkennen en hierop anticiperen.
De algoritmes en sensor suites die Li ontwikkelt, test hij in zijn lab, met behulp van bijvoorbeeld Tudor. Hoewel hij hoopt op een groter lab binnenkort, is Li dankbaar voor de support die hij krijgt binnen de faculteit. ‘Studenten en collega’s delen mijn passie en willen me graag helpen waar nodig’, vertelt hij. ‘Dat waardeer ik enorm.’
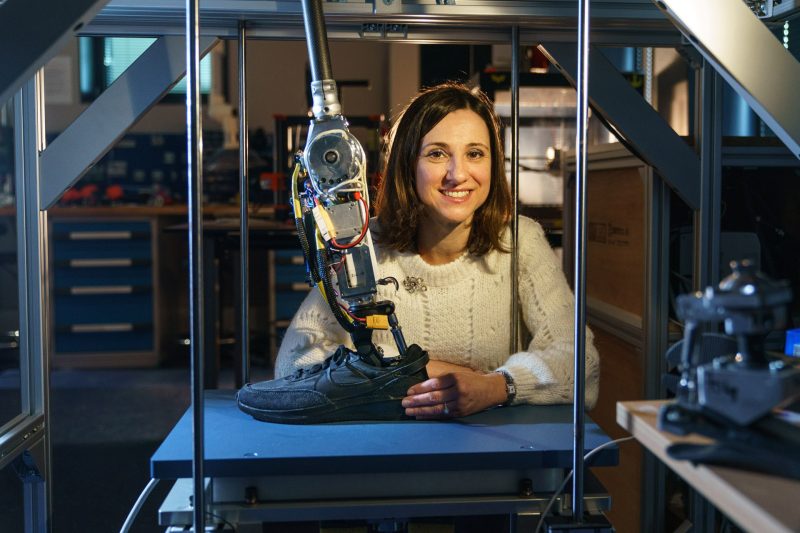
Raffaella Carloni’s robotbeen
Of protheses wel robots zijn? Jazeker, zegt universitair hoofddocent robotica Raffaella Carloni. ‘Als mensen denken aan robothulpjes, denken ze aan huishoudrobots’, vertelt ze. ‘Maar protheses zijn voor mij hetzelfde; dat zijn ook gewoon robots die mensen helpen en fysiek met ze omgaan.’
Een bionisch been bouwen gebeurt heel anders dan bij andere soorten robots. ‘Er is ook een mens bij betrokken die met dat been moet werken, wat het een beetje ingewikkelder maakt’, vertelt Carloni. ‘Je moet het systeem als geheel bekijken.’
Als ingenieur kun je niet alles zelf doen
Daarom omringt ze zich met een breed, interdisciplinair onderzoeksteam. ‘Als ingenieur kun je niet alles zelf doen.’ Een goed voorbeeld hiervan is het Europese Horizon2020 project MyLeg. ‘Ik wilde de resultaten echt de samenleving in krijgen en heb daarvoor contact gelegd met ziekenhuizen, patiënten en bedrijven’, zegt Carloni. Voor dit werk kreeg ze eind mei de Ben Feringa Impact Award.
Motortjes
Bijzonder aan dit robotbeen zijn de precieze motortjes in de knie, ofwel actuatoren, die de patiënt ondersteunen en het been makkelijk beweegbaar maken. ‘Het doel was om actuatoren te creëren die de functie van de menselijke gewrichten en spieren kunnen nabootsen’, vertelt ze. Patiënten kunnen dan meer zelf, waardoor hun levenskwaliteit toeneemt.
Momenteel werkt ze samen met het UMCG om de robot nóg beter te maken. Ze test hier het bionische been met meer patiënten. Het directe contact met gebruikers van de protheses vindt Carloni motiverend en inspirerend. ‘Patiënten willen graag samenwerken en hun feedback is heel waardevol.’